Инженеры из Лаборатории компьютерных наук и искусственного интеллекта (CSAIL) при Массачусетском технологическом институте (MIT) продемонстрировали платформу PIGINet (Plans, Images, Goal, Initial Facts — «планы, изображения, цели и исходные факты»), предназначенную для навигации и планирования задач домашних роботизированных систем.
Человеческое жилье представляется роботу довольно сложной средой — машины лучше ориентируются на складах и в производственных цехах с их более простой навигацией и строгой организацией пространства. А для успешного выполнения задач большинству роботов необходим план помещения. Ситуация осложняется тем, что жилища могут значительно отличаться друг от друга, а интерьеры в них ещё и динамичны — люди любят переставлять мебель и разбрасывать вещи. Самыми распространёнными бытовыми роботами являются пылесосы, но и они, отработав не одно десятилетие на рынке, продолжают совершенствоваться.
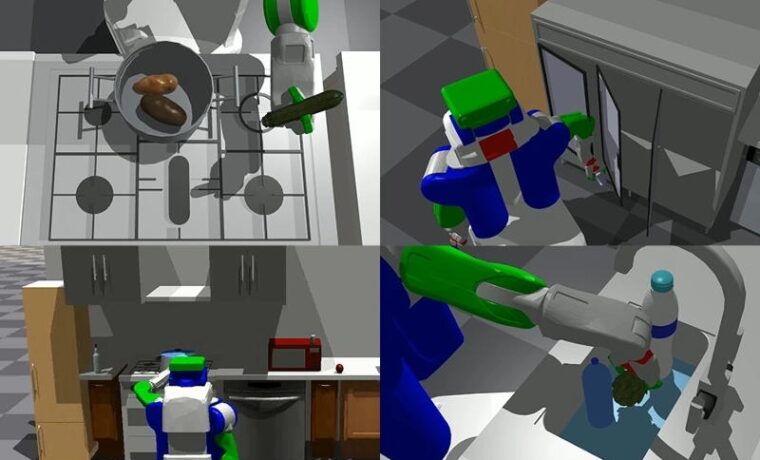
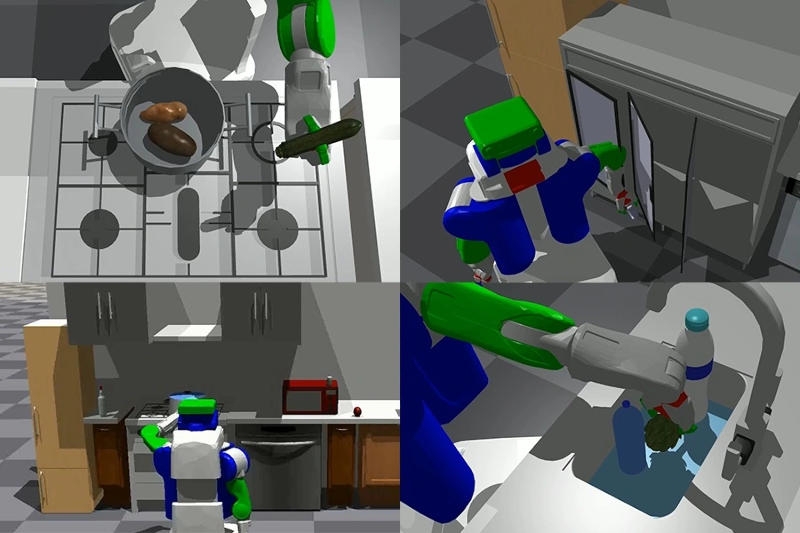
Подспорьем в решении проблемы обещает стать платформа PIGINet, в основе которой лежит универсальный кодировщик-трансформер, предназначенный для обработки последовательностей данных. «Входящей последовательностью в данном случае является информация о том, какой план задач рассматривается, изображения среды, символьные кодировки исходного состояния и желаемая цель. Кодировщик объединяет планы задач, изображения и текст, чтобы составить прогноз относительно выполнимости выбранного плана задач», — пояснили авторы проекта механизм работы модели.
В существующей версии система преимущественно ориентирована для работы на кухне. Она моделирует рабочую среду и создаёт планы объектов, включающие в себя стойки, шкафчики, холодильник, раковины и т. д. По словам разработчиков, в большинстве случаев система позволяет сократить время планирования задач на 80 %, а в более сложных случаях это 20–50 %. В перспективе, говорят создатели PIGINet, система при выявлении невыполнимых задач должна научиться предлагать альтернативные сценарии — это в корне изменит процесс обучения роботов и механизмы их использования в каждом доме.













